《《自動(dòng)控制理論》第四章隨堂測試及參考答案.ppt》由會(huì)員分享���,可在線閱讀�����,更多相關(guān)《《自動(dòng)控制理論》第四章隨堂測試及參考答案.ppt(10頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
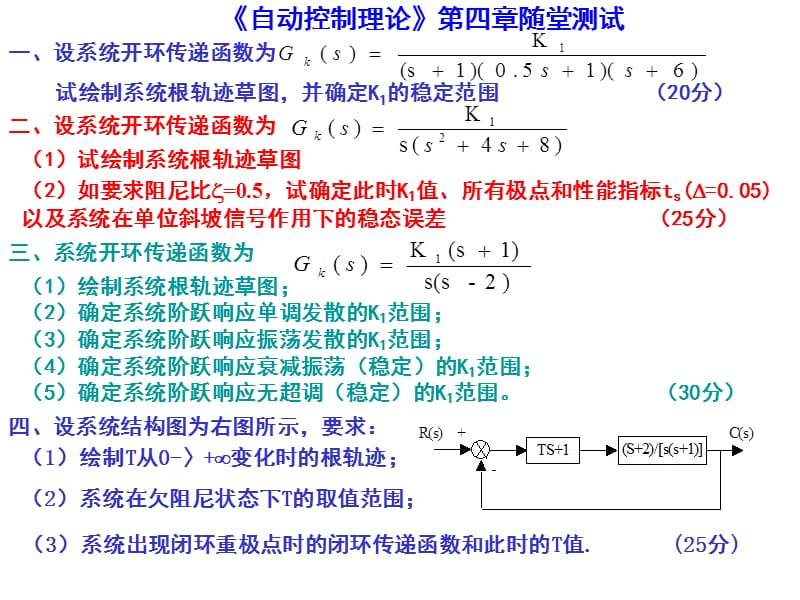
1��、自動(dòng)控制理論第四章隨堂測試,二��、設(shè)系統(tǒng)開環(huán)傳遞函數(shù)為,(1)試?yán)L制系統(tǒng)根軌跡草圖,,三����、系統(tǒng)開環(huán)傳遞函數(shù)為,(1)繪制系統(tǒng)根軌跡草圖�;,一�����、設(shè)系統(tǒng)開環(huán)傳遞函數(shù)為,試?yán)L制系統(tǒng)根軌跡草圖����,并確定K1的穩(wěn)定范圍 (20分),(2)確定系統(tǒng)階躍響應(yīng)單調(diào)發(fā)散的K1范圍;,(3)確定系統(tǒng)階躍響應(yīng)振蕩發(fā)散的K1范圍��;,(4)確定系統(tǒng)階躍響應(yīng)衰減振蕩(穩(wěn)定)的K1范圍��;,(5)確定系統(tǒng)階躍響應(yīng)無超調(diào)(穩(wěn)定)的K1范圍�����。 (30分),(2)如要求阻尼比=0.5���,試確定此時(shí)K1值����、所有極點(diǎn)和性能指標(biāo)ts(=0.05) 以及系統(tǒng)在單位斜坡信號(hào)作用下的穩(wěn)態(tài)誤差 (25分),四、設(shè)系統(tǒng)結(jié)構(gòu)圖為右圖所示
2���、��,要求:,(1)繪制T從0-+變化時(shí)的根軌跡���;,(2)系統(tǒng)在欠阻尼狀態(tài)下T的取值范圍;,(3)系統(tǒng)出現(xiàn)閉環(huán)重極點(diǎn)時(shí)的閉環(huán)傳遞函數(shù)和此時(shí)的T值. (25分),第四章隨堂練習(xí)參考答案,一,三個(gè)開環(huán)極點(diǎn)(即根軌跡的起點(diǎn))為:,漸近線傾角:,漸近線與實(shí)軸的交點(diǎn)坐標(biāo):,實(shí)軸上的分離點(diǎn):由特征方程:,得,解得,分離角:,實(shí)軸上的根軌跡: (-,-6,-2,-1,由此繪制的系統(tǒng)根軌跡如右圖:,k1:的穩(wěn)定范圍:,根軌跡與虛軸的交點(diǎn)坐標(biāo):由勞斯判據(jù)得,系統(tǒng)開環(huán)極點(diǎn)為:,無開環(huán)零點(diǎn)�,三條根軌跡趨向無窮遠(yuǎn),實(shí)軸上的根軌跡:(-,0,漸近線傾角:,漸近線與實(shí)軸的交點(diǎn)坐標(biāo):,,無實(shí)軸上的分離點(diǎn)��;,的出射角:,二,根
3�、軌跡與虛軸的交點(diǎn):用勞斯判據(jù)法可求得k1穩(wěn)定范圍:,與虛軸交點(diǎn)坐標(biāo):,繪制根軌跡圖如下:,過坐標(biāo)原點(diǎn)作||=60等阻尼線,與根軌跡相交,量得交點(diǎn)坐標(biāo)為:-0.91.9j,因n=3,m=0,根據(jù)閉環(huán)極點(diǎn)之和與開環(huán)極點(diǎn)之和的關(guān)系,可求得第三個(gè)閉環(huán)極點(diǎn)為,可知-0.91.9基本可作系統(tǒng)的共軛復(fù)數(shù)主導(dǎo)極點(diǎn),可計(jì)算出,,K1=9.5,(1)二個(gè)開環(huán)極點(diǎn)(即根軌跡的起點(diǎn))為:,n=2,開環(huán)零點(diǎn),,m=1�����,有一條根軌跡趨向無窮遠(yuǎn)處,實(shí)軸上的根軌跡:(-����,-1及0,-2���;,這是典型的兩個(gè)開環(huán)極點(diǎn),一個(gè)零點(diǎn)的情況.其根軌跡在復(fù)平面上的部分為圓弧,,圓心位于(-0,0j),半徑為:,根軌跡如下圖所示:,三,(2)
4、0k1 00.54,(3)0.54
 《自動(dòng)控制理論》第四章隨堂測試及參考答案.ppt
《自動(dòng)控制理論》第四章隨堂測試及參考答案.ppt