《機(jī)電設(shè)備備件需求預(yù)測(cè)》由會(huì)員分享���,可在線閱讀�,更多相關(guān)《機(jī)電設(shè)備備件需求預(yù)測(cè)(2頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1、機(jī)電設(shè)備備件需求預(yù)測(cè)
機(jī)電設(shè)備備件需求預(yù)測(cè)
2014/08/14
《電子設(shè)計(jì)工程雜志》2014年第十一期
1模型介紹
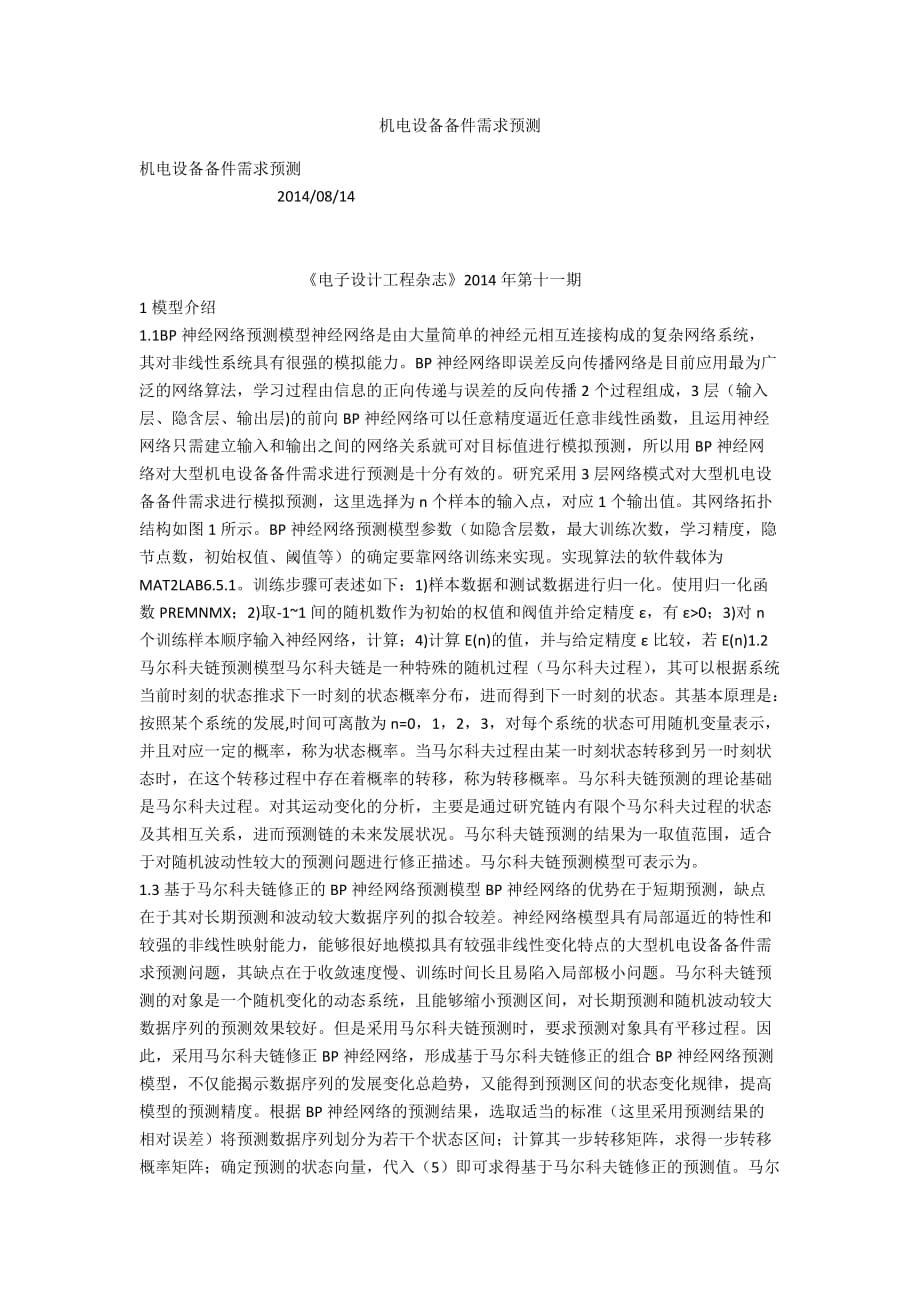
1.1BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)模型神經(jīng)網(wǎng)絡(luò)是由大量簡(jiǎn)單的神經(jīng)元相互連接構(gòu)成的復(fù)雜網(wǎng)絡(luò)系統(tǒng)��,其對(duì)非線性系統(tǒng)具有很強(qiáng)的模擬能力���。BP神經(jīng)網(wǎng)絡(luò)即誤差反向傳播網(wǎng)絡(luò)是目前應(yīng)用最為廣泛的網(wǎng)絡(luò)算法���,學(xué)習(xí)過程由信息的正向傳遞與誤差的反向傳播2個(gè)過程組成,3層(輸入層�、隱含層、輸出層)的前向BP神經(jīng)網(wǎng)絡(luò)可以任意精度逼近任意非線性函數(shù)��,且運(yùn)用神經(jīng)網(wǎng)絡(luò)只需建立輸入和輸出之間的網(wǎng)絡(luò)關(guān)
2�����、系就可對(duì)目標(biāo)值進(jìn)行模擬預(yù)測(cè),所以用BP神經(jīng)網(wǎng)絡(luò)對(duì)大型機(jī)電設(shè)備備件需求進(jìn)行預(yù)測(cè)是十分有效的���。研究采用3層網(wǎng)絡(luò)模式對(duì)大型機(jī)電設(shè)備備件需求進(jìn)行模擬預(yù)測(cè)���,這里選擇為n個(gè)樣本的輸入點(diǎn),對(duì)應(yīng)1個(gè)輸出值����。其網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)如圖1所示。BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)模型參數(shù)(如隱含層數(shù)�����,最大訓(xùn)練次數(shù)����,學(xué)習(xí)精度,隱節(jié)點(diǎn)數(shù)�,初始權(quán)值、閾值等)的確定要靠網(wǎng)絡(luò)訓(xùn)練來(lái)實(shí)現(xiàn)�����。實(shí)現(xiàn)算法的軟件載體為MAT2LAB6.5.1�。訓(xùn)練步驟可表述如下:1)樣本數(shù)據(jù)和測(cè)試數(shù)據(jù)進(jìn)行歸一化�。使用歸一化函數(shù)PREMNMX�;2)取-1~1間的隨機(jī)數(shù)作為初始的權(quán)值和閥值并給定精度ε,有ε>0���;3)對(duì)n個(gè)訓(xùn)練樣本順序輸入神經(jīng)網(wǎng)絡(luò)��,計(jì)算�����;4)計(jì)算E(n)的值�����,并與給
3、定精度ε比較�����,若E(n)1.2馬爾科夫鏈預(yù)測(cè)模型馬爾科夫鏈?zhǔn)且环N特殊的隨機(jī)過程(馬爾科夫過程)�,其可以根據(jù)系統(tǒng)當(dāng)前時(shí)刻的狀態(tài)推求下一時(shí)刻的狀態(tài)概率分布,進(jìn)而得到下一時(shí)刻的狀態(tài)�。其基本原理是:按照某個(gè)系統(tǒng)的發(fā)展,時(shí)間可離散為n=0,1�,2�,3�,對(duì)每個(gè)系統(tǒng)的狀態(tài)可用隨機(jī)變量表示,并且對(duì)應(yīng)一定的概率����,稱為狀態(tài)概率。當(dāng)馬爾科夫過程由某一時(shí)刻狀態(tài)轉(zhuǎn)移到另一時(shí)刻狀態(tài)時(shí)���,在這個(gè)轉(zhuǎn)移過程中存在著概率的轉(zhuǎn)移��,稱為轉(zhuǎn)移概率�。馬爾科夫鏈預(yù)測(cè)的理論基礎(chǔ)是馬爾科夫過程���。對(duì)其運(yùn)動(dòng)變化的分析����,主要是通過研究鏈內(nèi)有限個(gè)馬爾科夫過程的狀態(tài)及其相互關(guān)系���,進(jìn)而預(yù)測(cè)鏈的未來(lái)發(fā)展?fàn)顩r��。馬爾科夫鏈預(yù)測(cè)的結(jié)果為一取值范圍�����,適合于對(duì)隨機(jī)波動(dòng)
4���、性較大的預(yù)測(cè)問題進(jìn)行修正描述���。馬爾科夫鏈預(yù)測(cè)模型可表示為。
1.3基于馬爾科夫鏈修正的BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)模型BP神經(jīng)網(wǎng)絡(luò)的優(yōu)勢(shì)在于短期預(yù)測(cè)�����,缺點(diǎn)在于其對(duì)長(zhǎng)期預(yù)測(cè)和波動(dòng)較大數(shù)據(jù)序列的擬合較差���。神經(jīng)網(wǎng)絡(luò)模型具有局部逼近的特性和較強(qiáng)的非線性映射能力����,能夠很好地模擬具有較強(qiáng)非線性變化特點(diǎn)的大型機(jī)電設(shè)備備件需求預(yù)測(cè)問題�����,其缺點(diǎn)在于收斂速度慢��、訓(xùn)練時(shí)間長(zhǎng)且易陷入局部極小問題�。馬爾科夫鏈預(yù)測(cè)的對(duì)象是一個(gè)隨機(jī)變化的動(dòng)態(tài)系統(tǒng)�����,且能夠縮小預(yù)測(cè)區(qū)間,對(duì)長(zhǎng)期預(yù)測(cè)和隨機(jī)波動(dòng)較大數(shù)據(jù)序列的預(yù)測(cè)效果較好��。但是采用馬爾科夫鏈預(yù)測(cè)時(shí)���,要求預(yù)測(cè)對(duì)象具有平移過程���。因此,采用馬爾科夫鏈修正BP神經(jīng)網(wǎng)絡(luò)�����,形成基于馬爾科夫鏈修正的組合B
5�、P神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)模型,不僅能揭示數(shù)據(jù)序列的發(fā)展變化總趨勢(shì)���,又能得到預(yù)測(cè)區(qū)間的狀態(tài)變化規(guī)律�����,提高模型的預(yù)測(cè)精度�。根據(jù)BP神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)結(jié)果��,選取適當(dāng)?shù)臉?biāo)準(zhǔn)(這里采用預(yù)測(cè)結(jié)果的相對(duì)誤差)將預(yù)測(cè)數(shù)據(jù)序列劃分為若干個(gè)狀態(tài)區(qū)間;計(jì)算其一步轉(zhuǎn)移矩陣���,求得一步轉(zhuǎn)移概率矩陣�;確定預(yù)測(cè)的狀態(tài)向量�����,代入(5)即可求得基于馬爾科夫鏈修正的預(yù)測(cè)值����。馬爾科夫鏈修正的BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)模型流程如圖2所示。將所提及的預(yù)測(cè)方法應(yīng)用于某風(fēng)力發(fā)電設(shè)備的供應(yīng)商���。選擇該供應(yīng)商在2011年5月至2012年12月某型號(hào)風(fēng)力發(fā)電設(shè)備相關(guān)的備件需求的時(shí)間序列數(shù)據(jù)作為研究對(duì)象����。
2實(shí)例驗(yàn)證
2.1BP神經(jīng)網(wǎng)絡(luò)備件需求預(yù)測(cè)在對(duì)樣本試驗(yàn)前���,首先將
6���、樣本分成獨(dú)立的兩部分訓(xùn)練集和測(cè)試集��。其中訓(xùn)練集用來(lái)估計(jì)模型,確定神經(jīng)網(wǎng)絡(luò)的大概層次和節(jié)點(diǎn)數(shù)的大致范圍�����,以2011年5月至2012年5月的需求數(shù)據(jù)作為分析對(duì)象���。測(cè)試集則檢驗(yàn)最終選擇的組合模型的性能��,以2012年6月至2012年12月的需求數(shù)據(jù)為驗(yàn)證對(duì)象����。BP神經(jīng)網(wǎng)絡(luò)中相關(guān)參數(shù)設(shè)置為:輸入層為5個(gè)結(jié)點(diǎn)����、隱含層為1層(包含10個(gè)結(jié)點(diǎn))、輸出層為1個(gè)結(jié)點(diǎn)���,即表示在滾動(dòng)預(yù)測(cè)中n=5���,k=1;最大訓(xùn)練次數(shù)為1000次,最大循環(huán)間隔數(shù)為50次��;訓(xùn)練收斂誤差為0.001。經(jīng)計(jì)算�����,BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)值見表1��。
2.2馬爾科夫鏈修正誤差殘值根據(jù)實(shí)際值與BP網(wǎng)絡(luò)預(yù)測(cè)值之間相對(duì)誤差的大小和分布密度�,將其劃分為4個(gè)狀態(tài)
7、�����,見表2��。根據(jù)表2可以確定訓(xùn)練樣本相對(duì)誤差所處的狀態(tài)��,結(jié)果見表2��。根據(jù)表1和表2��,由式(5)和式(6)可以計(jì)算出一步狀態(tài)轉(zhuǎn)移矩陣為:根據(jù)表1和表2����,由式(5)和式(6)可以計(jì)算出一步狀態(tài)轉(zhuǎn)移矩陣為。由表1中各年的狀態(tài)劃分結(jié)果確定對(duì)應(yīng)的狀態(tài)向量,結(jié)合P(1)代入式(5),得基于馬爾科夫鏈修正的BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)模型的預(yù)測(cè)結(jié)果表3所示�����。從修正結(jié)果可以看出����,馬爾科夫修正BP神經(jīng)網(wǎng)絡(luò)模型可以提高預(yù)測(cè)精度,使得修正值更接近于實(shí)際值�����。
3結(jié)論
基于BP神經(jīng)網(wǎng)絡(luò)[11]和馬爾科夫鏈2種預(yù)測(cè)方法�����,建立了新的大型機(jī)電設(shè)備備件需求預(yù)測(cè)模型��。采用BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)大型機(jī)電設(shè)備備件需求規(guī)律����,再用馬爾科夫鏈進(jìn)行殘差修正
8、���。由上述示例結(jié)果的對(duì)比可以看出�,相比單一的BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)方法其結(jié)果更接近實(shí)測(cè)值�����,表明該模型是可行的,在大型機(jī)電設(shè)備備件需求預(yù)測(cè)中有一定的推廣應(yīng)用價(jià)值��。當(dāng)然�,本研究在多個(gè)方面尚可改進(jìn)或進(jìn)一步研究,例如在歷史數(shù)據(jù)中含有的其他干擾(非隨機(jī)項(xiàng)的干擾)去除程度的確定和鑒定��、如何進(jìn)一步考慮客觀因素對(duì)需求預(yù)測(cè)的影響等方面����,還需要做進(jìn)一步深入的研究和探討。
作者:王靜濤許丹單位:天津大學(xué)管理與經(jīng)濟(jì)學(xué)部
上一個(gè)文章: 水泥現(xiàn)場(chǎng)監(jiān)控教學(xué)仿真研究下一個(gè)文章: 基于FPGA的激光轉(zhuǎn)臺(tái)控制系統(tǒng)
 機(jī)電設(shè)備備件需求預(yù)測(cè)
機(jī)電設(shè)備備件需求預(yù)測(cè)