《七自由度柔性機(jī)械臂機(jī)構(gòu)說(shuō)明》由會(huì)員分享,可在線閱讀�,更多相關(guān)《七自由度柔性機(jī)械臂機(jī)構(gòu)說(shuō)明(13頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
1����、七自由度柔性機(jī)械臂機(jī)構(gòu)說(shuō)明
設(shè)計(jì)目標(biāo)
由于人工成本的不斷提升,人們的剛性需求也不斷的擴(kuò)大�,生產(chǎn)自動(dòng)化越來(lái)越被人們所重視。也是社會(huì)發(fā)展的必然�����。讓機(jī)器人去完成一些高危��、骯臟�、重復(fù)��、精度高的工作�����。由此����,設(shè)計(jì)一款高精度,高靈活性的機(jī)器臂顯得更為重要。
設(shè)計(jì)的目標(biāo):高精度仿人工業(yè)機(jī)器人����。
運(yùn)用先進(jìn)的仿生理論與柔性設(shè)計(jì)為基礎(chǔ),設(shè)計(jì)開(kāi)發(fā)用二次式運(yùn)動(dòng)反饋來(lái)實(shí)現(xiàn)其高精度控制�,合理的仿人機(jī)構(gòu)來(lái)完成動(dòng)動(dòng)。
機(jī)械臂整體設(shè)計(jì)方案
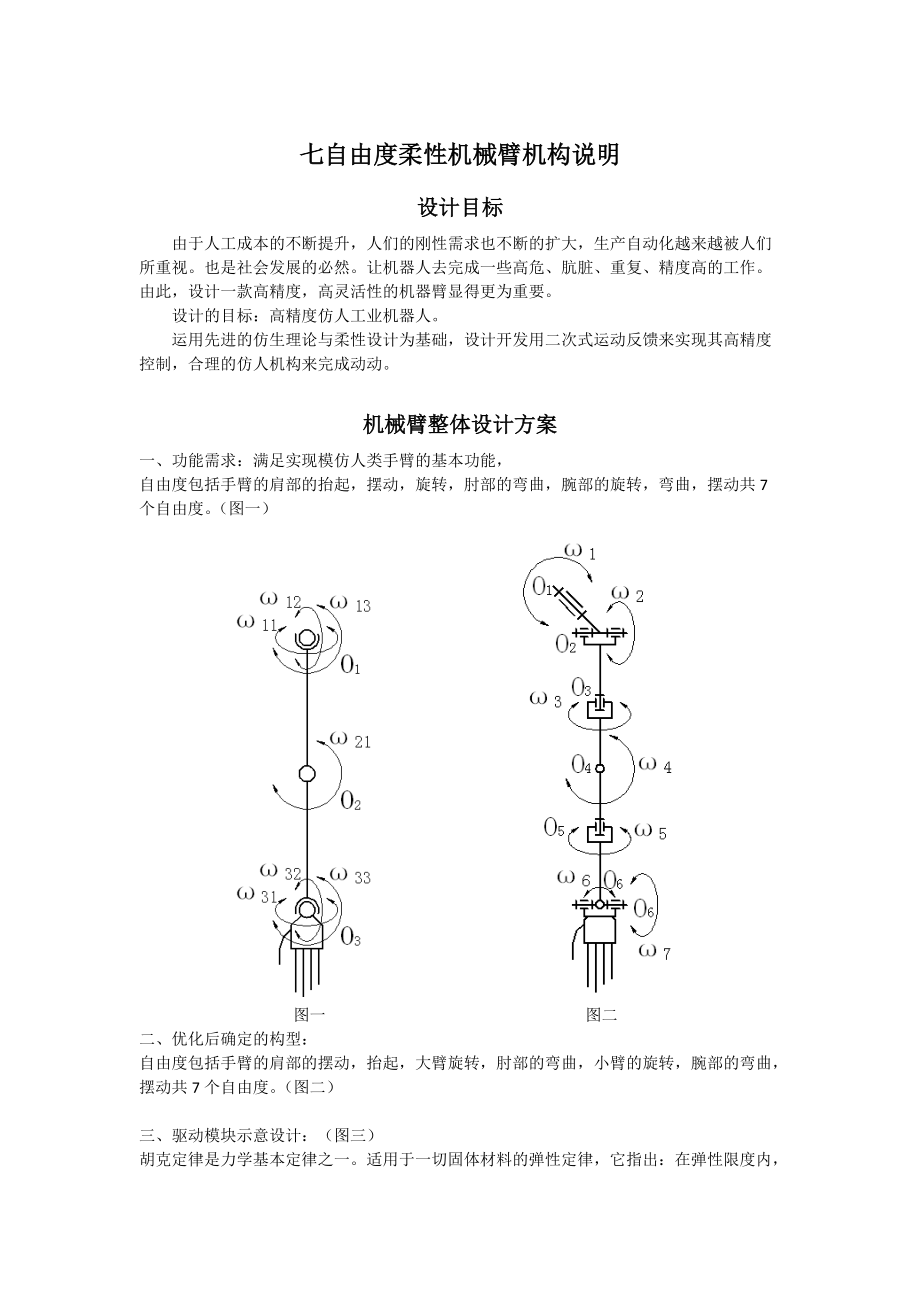
一����、功能需求:滿(mǎn)足實(shí)現(xiàn)模仿人類(lèi)手臂的基本功能,
自由度包括手臂的肩部的抬起���,擺動(dòng)�����,旋轉(zhuǎn)��,肘部的彎曲�����,腕部的旋轉(zhuǎn)�����,彎曲��,擺動(dòng)共7個(gè)自由度���。(圖一)
2��、
圖一 圖二
二�、優(yōu)化后確定的構(gòu)型:
自由度包括手臂的肩部的擺動(dòng)����,抬起,大臂旋轉(zhuǎn)�����,肘部的彎曲���,小臂的旋轉(zhuǎn),腕部的彎曲�,擺動(dòng)共7個(gè)自由度。(圖二)
三����、驅(qū)動(dòng)模塊示意設(shè)計(jì):(圖三)
胡克定律是力學(xué)基本定律之一��。適用于一切固體材料的彈性定律��,它指出:在彈性限度內(nèi)��,物體的形變跟引起形變的外力成正比���。這樣增加了力的反饋測(cè)量。在彈性材料在彈性限度內(nèi)形變時(shí)���,測(cè)得其形變量�����,從而計(jì)算出受力與關(guān)節(jié)下方所處的位置����。
1. 先進(jìn)行測(cè)試
圖三
四���、機(jī)械臂的具體設(shè)計(jì)方案���,(圖四)
3、
五����、各關(guān)節(jié)的受力分析:
基本尺寸圖(圖五)
圖五
L1=426mm�����,L2=293mm�����,L3=108mm����,L4=442mm�����。
六�、馬達(dá)的初選
諧波減速器的優(yōu)點(diǎn):
Harmonic減速器結(jié)構(gòu)簡(jiǎn)單,體積小����,重量輕���、嚙合的齒數(shù)多���、承載能力大�、運(yùn)動(dòng)精度高�����、運(yùn)動(dòng)平穩(wěn)�、間隙可以調(diào)整、傳動(dòng)效率高�、同軸性好、可實(shí)現(xiàn)向密閉空間傳遞運(yùn)動(dòng)及動(dòng)力��。
瑞士Maxon電機(jī)優(yōu)點(diǎn):
軸向竄動(dòng)和徑向跳動(dòng)小�����、溫度范圍大�����、回差小等�����,并且電機(jī)型號(hào)全編碼器與抱閘與控制器配套全面��。
瑞士Maxon電機(jī)與日本Harmonic諧波減速器選型需求
示例圖片:
4、
圖六
馬達(dá)1:EC90flat 90W 扭力:4.67 nm 0.387nm���;轉(zhuǎn)速:3190rpm���;重量:648g
減速器1:CSG-25-160 減速比:1:160;最大扭力:314nm��;正常:176nm���;重量:420g
馬達(dá)2:EC-4pole max30 200W 扭力:3.18 nm 0.112nm��;轉(zhuǎn)速:17000rpm����;重量:300g
減速器2:CSG-25-160 減速比:1:160��;最大扭力:314nm�����;正常:176nm���;重量:420g
馬達(dá)3:EC max40 170W 扭力:2.66nm0.16nm�����;轉(zhuǎn)速:9840rpm�����;重量:580g
減速
5����、器3:CSG-17-120 減速比:1:120�;扭力最大:112nm;正常:70nm��;重量:150g
馬達(dá)4:EC45flat 70W 扭力:0.82nm0.13nm�;轉(zhuǎn)速:4840rpm;重量:110g
減速器4:CSG-20-160 減速比:1:160����;最大扭力:191nm;正常:120nm����;重量:280g
馬達(dá)5:EC-4pole max30 100W 扭力:1.24nm 0.0 63nm;轉(zhuǎn)速:17800rpm;重量:210g
減速器5:CSD SHD-17-100 減速比:1:100�����;最大扭力:71nm���;正常:37nm���;重量:100g
馬達(dá)6:EC45flat 70W 扭力
6、:0.13 nm 0.17nm�����;轉(zhuǎn)速:4840rpm重量:110g
減速器6:CSF-11-100 減速比:1:100�����;最大扭力:25nm���;正常:11nm����;重量:50g
馬達(dá)7:EC-4pole max30 100W 扭力:1.24nm 0.0 63nm�����;轉(zhuǎn)速:17800rpm;重量:210g
減速器7:CSF-11-100 最大扭力:25nm�����;正常:11nm�;重量:50g
說(shuō)明:EC45flat 70W要更換為EC-I40 70W+MR
七��、受力分析:
有效扭力計(jì)算公式:(堵轉(zhuǎn)-連續(xù))*0.3+連續(xù)
質(zhì)量分配:
設(shè)大臂小臂均為���,外徑D=110mm�����,假設(shè)主體為外壁壁
7����、厚為L(zhǎng)=5mm的鋁殼�����,長(zhǎng)度為H=250mm����,
則體積為:412cm3���,鋁的密度2.7g/cm3,外殼質(zhì)量為1.1kg
大臂部分質(zhì)量有馬達(dá)3(580g)減速器(150g)����,外殼(1.1kg);小臂部分有馬達(dá)4567(110g�,210g,110g�,210g),減速器4567(280g��,100g���,50g�,50g)�,外殼(1.1kg);
手部主要是靈巧手的質(zhì)量設(shè)為1kg�����;外加假設(shè)載荷6kg�。
質(zhì)量分配示意圖如:圖七
圖七 圖五
則可得G1=0.58+0.15+1.1=1.83kg���;
G2=(0.1
8、1+0.21+0.11+0.21)+(0.28+0.1+0.05+0.05)+1.1 =2.22kg
G3=1+6=7kg
則大臂最大轉(zhuǎn)動(dòng)慣量 大臂M1=g*G1*L4/2=9.8*1.83*0.442/2=3.96nm
小臂M2= g*G2*L2/2=9.8*2.22*0.293/2=3.19nm
手 M3= g*G3*L3=9.8*7*0.108=7.55nm
總慣量為 大臂處M1總=M1+ g*G2*(L2/2+L4)+ g*G3*(L3+L2+L4)
=3.96+9.8*2.
9����、22*(0.293/2+0.442)+9.8*7*(0.108+0.293+0.442)
=3.96+12.8+57.83
=74.59nm
小臂處M2總=M2+ g*G3*(L3+L2)=3.19+9.8*7*(0.108+0.293)=30.70nm
八、馬達(dá)型號(hào)確認(rèn):
馬達(dá)1:扭力:4.67 nm 0.387nm�����,減速比:1:160�����,最大扭力:314nm���;正常:176nm;
則扭矩為�����,747nm���,61.92nm 包含M1總的74.59nm
馬達(dá)2:扭力:3.18 nm 0.112nm�;減速比:1:160最大扭力:314nm;正常:176nm���;
10���、則扭矩為,190.8nm���,17.92nm 包含M1總的74.59nm
馬達(dá)3:扭力:2.66nm0.16nm����;減速比:1:120����;最大扭力:112nm;正常:70nm����;
則扭矩為,319.2nm�,19.2nm 包含M2總30.70nm
馬達(dá)4:扭力:0.82nm0.13nm;減速比:1:160��;最大扭力:191nm�����;正常:120nm;
則扭矩為�,131.2nm,20.8nm 包含M2總30.70nm
馬達(dá)5:扭力:1.24nm 0.063nm�;減速比:1:100;最大扭力:71nm�����;正常:37nm��;
則扭矩為���,124nm,6.3nm 包含M3��,7.55nm
11�、
馬達(dá)6:扭力:0.82nm0.13nm;減速比:1:100���;最大扭力:25nm�����;正常:11nm�;
則扭矩為,82nm����,13nm 大于M3,7.55nm
馬達(dá)7:扭力:1.24nm 0.0 63nm��;減速比:1:100����;最大扭力:25nm;正常:11nm�����;
則扭矩為�����,124nm��,6.3nm 包含M3�,7.55nm
結(jié)論:馬達(dá)參數(shù)沒(méi)有異常。
馬達(dá)報(bào)價(jià):
馬達(dá)一EC90flat 90W+HEDL5540 公開(kāi)單價(jià)5982rmb CSG-25-160-2A-GR 公開(kāi)單價(jià)13246rmb
馬達(dá)二EC-4pole max30 200W+MR 公開(kāi)單價(jià)7372rmb CSG-2
12�、5-160-2A-GR 公開(kāi)單價(jià)13246rmb
馬達(dá)三EC40 170W+HEDL5540 公開(kāi)單價(jià)6259rmb CSG-17-120-2A-R 公開(kāi)單價(jià)9238RMB
馬達(dá)四EC45flat 70W(最好用EC-I40 70W+MR) 公開(kāi)單價(jià)4302rmb CSG-20-160-2A-GR 公開(kāi)單價(jià)11019rmb
馬達(dá)五EC40 170W+HEDL5540 公開(kāi)單價(jià)6259rmb CSD SHD-17-100-2A-R 公開(kāi)單價(jià)8393RMB
馬達(dá)六EC45flat 70W(最好用EC-I40 70W+MR) 公開(kāi)單價(jià)4302rmb CSF-11-100-2A-R 公開(kāi)單價(jià)5
13��、308RMB
馬達(dá)七EC-4pole max30 100W+MR 公開(kāi)單價(jià)6587rmb CSF-11-100-2A-R 公開(kāi)單價(jià)5308rmb
電機(jī)是1-4臺(tái)的價(jià)格���,大概有7個(gè)點(diǎn)幅度,諧波需要和日本確認(rèn)后����,日本才能給我們正式offer,我給你的價(jià)格是我別的項(xiàng)目時(shí)價(jià)格��,作為參考����,一般有10個(gè)點(diǎn)的浮動(dòng)
如果電單套數(shù)量5臺(tái),公開(kāi)價(jià)還要低
Harmonic
九���、各運(yùn)動(dòng)角度計(jì)算:
序號(hào)
名稱(chēng)
角度大小α
角度范圍β
備注
①
肩關(guān)節(jié)旋轉(zhuǎn)
180<α1< 225
β1=-135~90
外向內(nèi)
②
肩關(guān)節(jié)上下
90<α2<120
β2=-90~15
前向后
③
14、
上臂旋轉(zhuǎn)
120<α3<150
β3=90~270
外向內(nèi)
④
肘關(guān)節(jié)
120<α4< 150
β4=0~150
前向后
⑤
小臂旋轉(zhuǎn)
90<α5< 120
β5=0~150
外向內(nèi)
⑥
腕關(guān)節(jié)上下
90<α6< 120
β6=-90~45
前向后
⑦
腕關(guān)節(jié)左右
40<α7< 90
β7=-30~30
上向下這個(gè)沒(méi)有具體的坐標(biāo)軸���,不好判斷�����,比劃了一下沒(méi)找對(duì)感覺(jué)��,個(gè)人覺(jué)得應(yīng)該稍大于一般人的關(guān)節(jié)運(yùn)動(dòng)范圍���?�?梢栽俸藢?shí)一下����。
十���、結(jié)構(gòu)模型說(shuō)明
1�����,關(guān)節(jié)一 2����,關(guān)節(jié)一彈性材料 3���,關(guān)節(jié)二四連桿��, 4�����,關(guān)節(jié)二連桿 5��,大臂 6�,大
15、臂轉(zhuǎn)動(dòng)關(guān)節(jié) 7�,關(guān)節(jié)四彈性材料 8,關(guān)節(jié)五 9關(guān)節(jié)六彈性材料 10�,關(guān)節(jié)六連桿 11,關(guān)節(jié)七 12�,關(guān)節(jié)七彈性材料
整體圖
與身體連接法蘭
軸承固定零件
柔性材料腔體
抬大臂活動(dòng)連桿
柔性材料驅(qū)動(dòng)
抬臂柔性材料腔體
大臂外鋁支架
大臂下軸承固定零件
手腕連桿
手腕萬(wàn)向節(jié)
Csd-25-160諧波減速器
2. 三自由度平臺(tái)
3. 先做一個(gè)剛性的測(cè)試平臺(tái)(零件、兩個(gè)方案��、電機(jī)驅(qū)動(dòng)���、2.15號(hào)測(cè)試平臺(tái)方案)
4. 結(jié)構(gòu)發(fā)給老師(動(dòng)力分析建模)
5. 提供彈性系數(shù)���、負(fù)載、
6. 整個(gè)機(jī)構(gòu)的零件質(zhì)量(動(dòng)量)與尺寸(力臂)提供模型給
7. 電機(jī)����、減速機(jī)����、編碼器
8. 方案細(xì)化
9. 節(jié)前去采購(gòu)電機(jī)maxon�,(編碼盤(pán))增量式兩套�。
10. 成本核算-蔡
11. 外觀設(shè)計(jì)2月15號(hào)之前完成
12. 外觀設(shè)計(jì)完成后(2月15號(hào)左右)再討論一次
 七自由度柔性機(jī)械臂機(jī)構(gòu)說(shuō)明
七自由度柔性機(jī)械臂機(jī)構(gòu)說(shuō)明