《自動(dòng)控制理論_11結(jié)構(gòu)不穩(wěn)定及改進(jìn)措施》由會(huì)員分享��,可在線閱讀����,更多相關(guān)《自動(dòng)控制理論_11結(jié)構(gòu)不穩(wěn)定及改進(jìn)措施(34頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
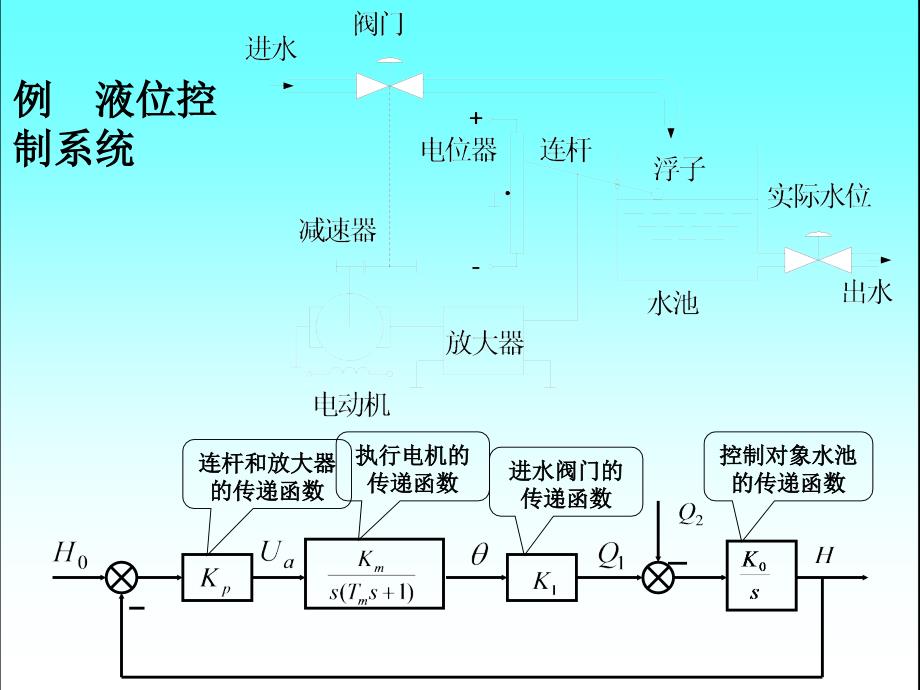
1����、單擊此處編輯母版標(biāo)題樣式,單擊此處編輯母版文本樣式,第二級(jí),第三級(jí),第四級(jí),第五級(jí),*,單擊此處編輯母版標(biāo)題樣式,單擊此處編輯母版文本樣式,第二級(jí),第三級(jí),第四級(jí),第五級(jí),*,-,連桿和放大器的傳遞函數(shù),執(zhí)行電機(jī)的傳遞函數(shù),進(jìn)水閥門的傳遞函數(shù),控制對(duì)象水池的傳遞函數(shù),例 液位控制系統(tǒng),-,系數(shù)缺項(xiàng)�,顯然不滿足系統(tǒng)穩(wěn)定的必要條件,無論怎么調(diào)整系統(tǒng)參數(shù)�����,都不能使系統(tǒng)穩(wěn)定�。,四.結(jié)構(gòu)不穩(wěn)定及改進(jìn)措施,某些系統(tǒng),僅僅靠調(diào)整參數(shù)仍無法穩(wěn)定��,稱,結(jié)構(gòu)不穩(wěn)定系統(tǒng),。,消除結(jié)構(gòu)不穩(wěn)定的措施有兩種,改變積分性質(zhì),引入比例微分控制�,補(bǔ)上特征方程中的缺項(xiàng)。,1.改變積分性質(zhì),用反饋 包圍積分環(huán)節(jié)或者包圍電動(dòng)機(jī)的傳遞
2�����、函數(shù)����,破壞其積分性質(zhì)。,2.引入比例微分控制,在原系統(tǒng)的前向通路中引入比例微分控制,��。,34 穩(wěn)態(tài)誤差分析及計(jì)算,一��、誤差與穩(wěn)態(tài)誤差,誤差e(t)定義為:e(t)=r(t)-c(t)輸出端誤差,誤差的另一種定義:,e(t)=r(t),-,b(t)輸入端誤差,穩(wěn)態(tài)誤差定義:,穩(wěn)定系統(tǒng)誤差的終值稱為穩(wěn)態(tài)誤差����。當(dāng)時(shí)間t趨于無窮時(shí),e(t)的極限存在�����,則穩(wěn)態(tài)誤差為,系統(tǒng)的穩(wěn)態(tài)誤差與系統(tǒng)的結(jié)構(gòu)有關(guān),還與輸入信號(hào)的大小及形式有關(guān)���。但是系統(tǒng)的穩(wěn)定性只取決于系統(tǒng)的結(jié)構(gòu)���。,0,t,C(t),e,ss,R,(t),二�����、穩(wěn)態(tài)誤差的計(jì)算,若e(t)的拉普拉斯變換為E(s)�����,且,注:,在計(jì)算系統(tǒng)誤差的終值(穩(wěn)態(tài)誤差)時(shí)
3�、���,遇到的誤差象函數(shù),E(s),一般是s的有理分式函數(shù)�,這時(shí)當(dāng)且僅當(dāng),sE(s),的極點(diǎn)均在左半復(fù)平面���,就可保證,成立��。,存在,系統(tǒng)如圖��,若定義,e(t),=,r(t),-,b(t),則,E(s),=,R(s),-,B(s),稱之為系統(tǒng)對(duì)輸入信號(hào)的誤差傳遞函數(shù)。,稱 為,系統(tǒng)對(duì)干擾的誤差傳遞函數(shù)�。,例1 系統(tǒng)結(jié)構(gòu)圖如圖所示,求 r(t)分別為A1(t),At,At,2,/2時(shí)系統(tǒng)的穩(wěn)態(tài)誤差��。,解,例3、,系統(tǒng)結(jié)構(gòu)如下圖����。當(dāng)輸入信號(hào)r(t)=1(t),干擾n(t)=1(t)時(shí),求系統(tǒng)的穩(wěn)態(tài)誤差,解:判斷穩(wěn)定性�。由于是一階系統(tǒng),所以只要參數(shù) 大于零�����,系統(tǒng)就穩(wěn)定���。,求E(s),根據(jù)結(jié)構(gòu)圖可以求出:,依
4����、題意:R(s)=N(s)=1/s���,則,應(yīng)用終值定理得穩(wěn)態(tài)誤差,三.,輸入信號(hào)作用下的穩(wěn)態(tài)誤差與系統(tǒng)結(jié)構(gòu)參數(shù)的關(guān)系,將,G(s)H(s),寫成典型環(huán)節(jié)串聯(lián)形式:,當(dāng)sE(s)的極點(diǎn)全部在s平面的左半平面時(shí)����,可用終值定理求得,:,上式表明:系統(tǒng)的穩(wěn)態(tài)誤差除與輸入有關(guān)外���,還與系統(tǒng)的開環(huán)增益K和積分環(huán)節(jié)的個(gè)數(shù)有關(guān),����。,1.在階躍信號(hào)作用下,要消除階躍信號(hào)作用下的穩(wěn)態(tài)誤差,開環(huán)傳遞函數(shù)中至少要有一個(gè)積分環(huán)節(jié)�����。,2.在斜坡信號(hào)作用下,要消除斜坡信號(hào)作用下的穩(wěn)態(tài)誤差��,開環(huán)傳遞函數(shù)中至少要有兩個(gè)積分環(huán)節(jié),����。,3.等加速信號(hào)作用下,要消除等加速信號(hào)作用下的穩(wěn)態(tài)誤差,開環(huán)傳遞函數(shù)中至少要有三個(gè)積分環(huán)節(jié)�����。,由以上分
5���、析可見���,要消除系統(tǒng)在冪函數(shù)輸入信號(hào)作用下的穩(wěn)態(tài)誤差,則應(yīng)增加積分環(huán)節(jié)的數(shù)目�����;若只要求減小系統(tǒng)的穩(wěn)態(tài)誤差���,則應(yīng)提高開環(huán)增益,����。,系統(tǒng)型別是針對(duì)系統(tǒng)的,開環(huán)傳遞,函數(shù)中積分環(huán)節(jié)的個(gè)數(shù)而言的����。,=的系統(tǒng)稱為型系統(tǒng);,的系統(tǒng)稱為型系統(tǒng)����;,的系統(tǒng)稱為,型系統(tǒng)。,注意事項(xiàng),系統(tǒng)必須是穩(wěn)定的��,否則計(jì)算穩(wěn)態(tài)誤差無意義����;,以上結(jié)論僅適用于輸入信號(hào)作用下系統(tǒng)的穩(wěn)態(tài)誤差,不適用于干擾作用下系統(tǒng)的穩(wěn)態(tài)誤差���;,上述公式中必須是系統(tǒng)的開環(huán)增益�,也即開環(huán)傳遞函數(shù)中,各典型環(huán)節(jié)的常數(shù)項(xiàng)均為時(shí)的系數(shù)��。,例4:系統(tǒng)結(jié)構(gòu)如下圖:若輸入信號(hào)為,試求系統(tǒng)的穩(wěn)態(tài)誤差,�。,解:判斷穩(wěn)定性。系統(tǒng)的閉環(huán)特征方程為,根據(jù)系統(tǒng)結(jié)構(gòu)與穩(wěn)態(tài)誤差之間的
6��、關(guān)系�����,可以直接求,從結(jié)構(gòu)圖看出���,該系統(tǒng)為單位反饋且屬型系統(tǒng)�。因此,4���、任意輸入信號(hào),利用動(dòng)態(tài)誤差系數(shù)�,可以求解輸入信號(hào)為任意時(shí)間函數(shù)時(shí)的系統(tǒng)穩(wěn)態(tài)誤差����。,將閉環(huán)傳函在s=0的鄰域展開成泰勒級(jí)數(shù),在零初始條件下(忽略t=0的脈沖),對(duì)上式進(jìn)行拉氏反變換����,得到誤差信號(hào)e(t)的穩(wěn)態(tài)分量,式中,解.由題意寫出系統(tǒng)的誤差傳遞函數(shù),由上式求得動(dòng)態(tài)誤差系數(shù),對(duì)輸入信號(hào)求導(dǎo),將數(shù)據(jù)代入得,四��、干擾作用下的穩(wěn)態(tài)誤差,理想情況下,系統(tǒng)對(duì)于任意形式的干擾作用,其穩(wěn)態(tài)誤差應(yīng)當(dāng)為0,即對(duì)于干擾信號(hào),N,(s)而言,理想的情況就是干擾引起的輸出為0,希望系統(tǒng)的輸出一點(diǎn)都不受擾動(dòng)的影響����。實(shí)際上這是不可能的�。,G,1,(s)
7��、,N,(s),R,(s),E,(s),-,C,(s),H,(s),G,2,(s),如圖所示�,如果輸入信號(hào),R,(s)=0,僅有干擾,N,(s)作用時(shí),系統(tǒng)誤差為:,干擾,作用下的穩(wěn)態(tài)誤差,實(shí)質(zhì)上就是干擾引起的穩(wěn)態(tài)輸出的負(fù)值,它與開環(huán)傳遞函數(shù),G,(s)=,G,1(s),G,2(s),H,(s),及干擾信號(hào),N,(s)有關(guān),還與干擾作用點(diǎn)的位置有關(guān)。,G,1,(s),N,(s),R,(s),E,(s),-,C,(s),H,(s),G,2,(s),用一待定的 來代替圖中的 ,然后找出消除系統(tǒng)在干擾n(t)作用下的誤差時(shí)�����,需具備的條件,��。,以上分析表明�����,是誤差信號(hào)到干擾作用點(diǎn)之間的傳遞函數(shù)�,系統(tǒng)在時(shí)間冪函數(shù)干擾作用下的穩(wěn)態(tài)誤差 與干擾作用點(diǎn)到誤差信號(hào)之間的積分環(huán)節(jié)數(shù)目和增益大小有關(guān),,而與干擾作用點(diǎn)后面的積分環(huán)節(jié)數(shù)目和增益大小無關(guān)����。,例6 系統(tǒng)結(jié)構(gòu)圖如圖所示����,當(dāng)輸入信號(hào)為單位斜坡函數(shù)時(shí)���,求系統(tǒng)在輸入信號(hào)作用下的穩(wěn)態(tài)誤差��;調(diào)整K值能使穩(wěn)態(tài)誤差小于0.1嗎���?,-,解:只有穩(wěn)定的系統(tǒng)計(jì)算穩(wěn)態(tài)誤差才有意義;所以先判穩(wěn),系統(tǒng)特征方程為,由勞斯判據(jù)知穩(wěn)定的條件為:,由穩(wěn)定的條件知:不能滿足 的要求,作業(yè),(11),
 自動(dòng)控制理論_11結(jié)構(gòu)不穩(wěn)定及改進(jìn)措施
自動(dòng)控制理論_11結(jié)構(gòu)不穩(wěn)定及改進(jìn)措施