《基于UG建模的辛普森行星齒輪在ADAMS中運(yùn)動(dòng)仿真的實(shí)現(xiàn)(共5頁)》由會(huì)員分享��,可在線閱讀����,更多相關(guān)《基于UG建模的辛普森行星齒輪在ADAMS中運(yùn)動(dòng)仿真的實(shí)現(xiàn)(共5頁)(5頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�。
1��、精選優(yōu)質(zhì)文檔-----傾情為你奉上
基于UG建模的辛普森行星齒輪在ADAMS中運(yùn)動(dòng)仿真的實(shí)現(xiàn)
摘要 利用UG參數(shù)化建模功能�����,建立了辛普森行星齒輪機(jī)構(gòu)的三維模型����,并成功將其裝配體導(dǎo)入到專業(yè)運(yùn)動(dòng)仿真軟件Adams中�����。根據(jù)其真實(shí)的工作狀態(tài)����,通過添加約束、驅(qū)動(dòng)����,實(shí)現(xiàn)了對(duì)辛普森行星齒輪機(jī)構(gòu)在各檔位運(yùn)動(dòng)狀態(tài)的仿真。在后處理模塊中�,可以清晰的判定各個(gè)構(gòu)件在不同檔位時(shí)的轉(zhuǎn)動(dòng)方向及速度大小���,更加直觀的加深了對(duì)汽車自動(dòng)變速器換擋機(jī)理的認(rèn)識(shí)與了解。
關(guān)鍵詞 UG建模 辛普森行星機(jī)構(gòu) ADAMS仿真
The Motion Simulation of Simpson Planetary Gear based
2����、 on UG in ADAMS
Abstract Take advantage of the parametric modeling in UG, the simpson planetary gear modeling have been made, then been imported successfully into the ADAMS. In the ADAMS, it was exerted constraint and driver according to the actual working status, and have achieved the motion simu
3、lation of the simpson planetary gear working in the different gears. In the post-processing module, it could be clearly determined what direction of rotation is and how much the angular velocity is when the various components working in different gears. It contributed to have a deeper and intuitive
4�、understanding about the gear shift principle of the automatic gearbox.
Key words UG modeling Simpson planetary gear ADAMS motion simulation
專心---專注---專業(yè)
引言
自動(dòng)變速器在汽車中是僅次于發(fā)動(dòng)機(jī)的關(guān)鍵部件,是機(jī)—電—液一體化的典型產(chǎn)品����。目前,大部分自動(dòng)變速器都采用辛普森行星齒輪變速器�����。辛普森是行星齒輪機(jī)構(gòu)是一種雙排行星齒輪機(jī)構(gòu)����,由兩個(gè)內(nèi)嚙合式單排行星齒輪機(jī)構(gòu)組合而成,可實(shí)現(xiàn)三進(jìn)一退四個(gè)檔位變速?�,F(xiàn)在廣泛應(yīng)用的四前進(jìn)擋位
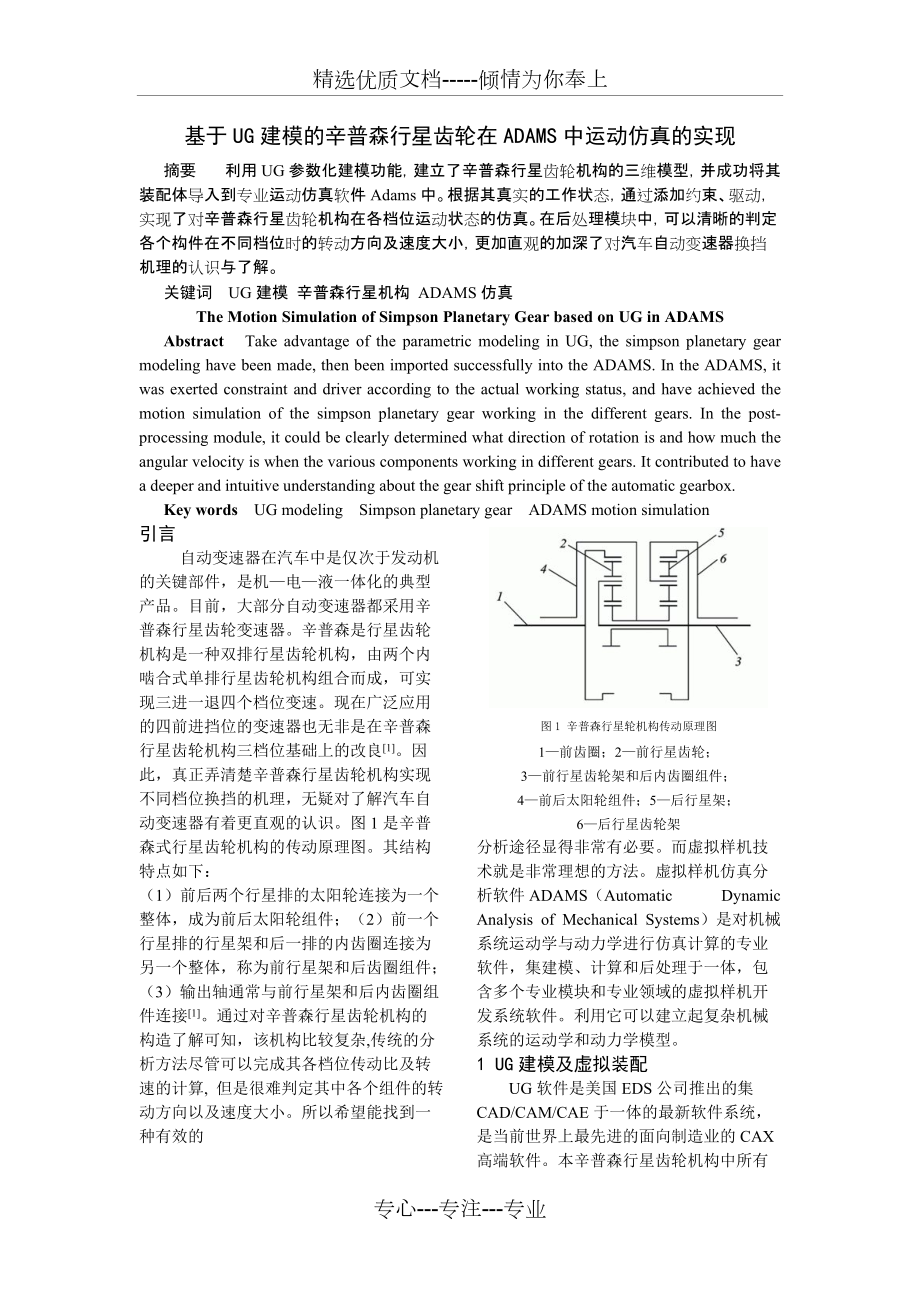
5�����、的變速器也無非是在辛普森行星齒輪機(jī)構(gòu)三檔位基礎(chǔ)上的改良[1]。因此�,真正弄清楚辛普森行星齒輪機(jī)構(gòu)實(shí)現(xiàn)不同檔位換擋的機(jī)理,無疑對(duì)了解汽車自動(dòng)變速器有著更直觀的認(rèn)識(shí)�����。圖1是辛普森式行星齒輪機(jī)構(gòu)的傳動(dòng)原理圖�。其結(jié)構(gòu)特點(diǎn)如下:
(1)前后兩個(gè)行星排的太陽輪連接為一個(gè)整體,成為前后太陽輪組件����;(2)前一個(gè)行星排的行星架和后一排的內(nèi)齒圈連接為另一個(gè)整體,稱為前行星架和后齒圈組件����;(3)輸出軸通常與前行星架和后內(nèi)齒圈組件連接[1]���。通過對(duì)辛普森行星齒輪機(jī)構(gòu)的構(gòu)造了解可知�,該機(jī)構(gòu)比較復(fù)雜,傳統(tǒng)的分析方法盡管可以完成其各檔位傳動(dòng)比及轉(zhuǎn)速的計(jì)算, 但是很難判定其中各個(gè)組件的轉(zhuǎn)動(dòng)方向以及速度大小��。所以希望能找到一
6�����、種有效的
圖1 辛普森行星輪機(jī)構(gòu)傳動(dòng)原理圖
1—前齒圈;2—前行星齒輪�;
3—前行星齒輪架和后內(nèi)齒圈組件;
4—前后太陽輪組件�;5—后行星架;
6—后行星齒輪架
分析途徑顯得非常有必要����。而虛擬樣機(jī)技術(shù)就是非常理想的方法。虛擬樣機(jī)仿真分析軟件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是對(duì)機(jī)械系統(tǒng)運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)進(jìn)行仿真計(jì)算的專業(yè)軟件�����,集建模����、計(jì)算和后處理于一體,包含多個(gè)專業(yè)模塊和專業(yè)領(lǐng)域的虛擬樣機(jī)開發(fā)系統(tǒng)軟件���。利用它可以建立起復(fù)雜機(jī)械系統(tǒng)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型��。
1 UG建模及虛擬裝配
UG軟件是美國EDS
7�、公司推出的集CAD/CAM/CAE于一體的最新軟件系統(tǒng)�����,是當(dāng)前世界上最先進(jìn)的面向制造業(yè)的CAX高端軟件。本辛普森行星齒輪機(jī)構(gòu)中所有齒輪的建模都是通過UG軟件中的參數(shù)化建模完成��。參數(shù)化建模是近期才發(fā)展起來的先進(jìn)三維實(shí)體造型技術(shù)�����,現(xiàn)已逐步成為三維CAD的主流技術(shù)�。參數(shù)化設(shè)計(jì)就是用一組參數(shù)來約束模型幾何形狀和尺寸關(guān)系,即參數(shù)與設(shè)計(jì)對(duì)象的控制尺寸有顯示的對(duì)應(yīng)關(guān)系�����,通常用于系列化和標(biāo)準(zhǔn)化設(shè)計(jì)[2]����。
通過圖1對(duì)辛普森行星齒輪機(jī)構(gòu)傳動(dòng)原理的了解可知,整套機(jī)構(gòu)中共有三種類型齒輪����,一個(gè)共用的太陽輪�����、行星輪及前后兩個(gè)齒圈����。該機(jī)構(gòu)中的所有齒輪均為直齒圓柱齒輪�,模數(shù)為3�,壓力角為20°。太陽輪齒數(shù)Zt為48�,行星
8、輪齒數(shù)Zx為36�,內(nèi)齒圈齒數(shù)Zq為120。
直齒圓柱齒輪的輪廓漸開線的繪制是齒輪建模的關(guān)鍵所在�����,漸開線繪制的精確與否直接影響到齒輪間傳動(dòng)的精度��。在UG中�,齒輪漸開線的繪制科通過表達(dá)式編輯器來實(shí)現(xiàn)。在表達(dá)式編輯器中���,建立漸開線曲線表達(dá)式如表格1示�����。
表格1 直齒圓柱齒輪漸開線表達(dá)式
名稱
公式
值
單位
a
0
0
度
b
60
60
度
r
db
rb
mm
t
0
0
u
(1-t)*a+t*b
0
度
xt
r*cos(u)+r*rad(u)*sin(u)
rb
mm
yt
r*sin(u)-r*rad(u)*cos(u)
9��、
0
mm
單擊確定便可生成漸開線����。然后依次創(chuàng)建齒輪齒坯, 繪制齒槽截面曲線,拉伸齒槽截面曲線形成齒槽, 執(zhí)行求差布爾運(yùn)算從齒輪坯體上切出單個(gè)齒槽, 接著環(huán)形陣列單個(gè)齒槽, 創(chuàng)建全部齒槽, 從而形成全部輪齒。最后,對(duì)模型細(xì)化, 創(chuàng)建槽孔�、倒角和圓角等。所有組件建模完畢后��,進(jìn)入U(xiǎn)G裝配環(huán)境中�,根據(jù)辛普森行星齒輪機(jī)構(gòu)的原理圖,進(jìn)行裝配并進(jìn)行干涉檢測�����。最終建成的裝配體如圖2示��。
圖2 建模完成后的裝配體
2 基于ADAMS運(yùn)動(dòng)學(xué)仿真
2.1 導(dǎo)入文件并定義材料屬性
由于ADAMS軟件對(duì)Parasolid接口文件識(shí)別較好����,可以有效避免裝配體在格式轉(zhuǎn)化中數(shù)據(jù)丟失或出錯(cuò)的問題,所以把U
10��、G 里生成的prt文件導(dǎo)入ADAMS 之前更改為Parasolid格式�。打開Adams-aview����,導(dǎo)入轉(zhuǎn)化后的文件�����,將各個(gè)組件的材料定義為steel����。模型如圖3所示�。
圖3 初導(dǎo)入ADAMS中的裝配體
圖4 添加約束與驅(qū)動(dòng)的裝配體
2.2 添加約束
本機(jī)構(gòu)所需要添加的約束最重要的是前后排太陽輪與行星輪、行星輪與內(nèi)齒圈四個(gè)齒輪副�����。齒輪副是一個(gè)復(fù)合副�����,齒輪副約束兩個(gè)旋轉(zhuǎn)副或滑移副之間的自由度成一定比例����。
齒輪副關(guān)聯(lián)兩個(gè)運(yùn)動(dòng)副和一個(gè)方向坐標(biāo)系(Marker),這兩個(gè)運(yùn)動(dòng)副可以是旋轉(zhuǎn)副��、滑移副或圓柱副��,通過它們的不同組合,就可以模擬直齒齒輪�����、斜齒齒輪�����、椎齒輪��、行星齒輪��、渦輪-
11��、蝸桿和齒輪- 齒條等傳動(dòng)形式[3]���。行星齒輪系的運(yùn)動(dòng)特點(diǎn)是��,行星輪本身自轉(zhuǎn)和繞軸心公轉(zhuǎn)�,中心輪繞軸心自轉(zhuǎn)�。一般簡單齒輪副的公共機(jī)架設(shè)為大地(ground),但行星輪系中的行星輪需要?jiǎng)?chuàng)建兩個(gè)旋轉(zhuǎn)副����,一個(gè)繞軸心公轉(zhuǎn)�����,一個(gè)繞本身質(zhì)心自轉(zhuǎn),而行星輪的質(zhì)心相對(duì)于大地是運(yùn)動(dòng)的�,所以不能選擇大地作為行星輪和太陽輪以及行星輪和齒圈的齒輪副的公共機(jī)架,而選擇行星架作為公共機(jī)架���。
2.2.1行星輪系旋轉(zhuǎn)副的創(chuàng)建
前排行星輪由前齒圈���,太陽輪及和后齒圈一體的前行星架組成。首先對(duì)各組件建立旋轉(zhuǎn)副�����。單擊工具欄中的旋轉(zhuǎn)副按鈕�����,并將創(chuàng)建旋轉(zhuǎn)副的選項(xiàng)設(shè)置為2 Bod-1 Loc和Normal Grid��。具體操作步驟如
12��、下:
(1)對(duì)太陽輪�����、前排行星輪、前齒圈相對(duì)于后齒圈分別創(chuàng)建旋轉(zhuǎn)副�,旋轉(zhuǎn)副作用點(diǎn)選在各自的質(zhì)心位置,系統(tǒng)分別默認(rèn)命名為Joint1��、Joint2(3�、4),Joint5��。
(2)對(duì)后齒圈相對(duì)于大地ground創(chuàng)建旋轉(zhuǎn)副���,作用點(diǎn)選在后齒圈質(zhì)心位置�。系統(tǒng)默認(rèn)命名為Joint6���。
(3)對(duì)太陽輪����、后排行星輪�、后齒圈相對(duì)于后齒架分別創(chuàng)建旋轉(zhuǎn)副,旋轉(zhuǎn)副作用點(diǎn)選在各自質(zhì)心位置�����。系統(tǒng)分別默認(rèn)命名為Joint7、Joint8(9��、10)�����,Joint11��。
(4)對(duì)后齒架相對(duì)于大地ground創(chuàng)建旋轉(zhuǎn)副�,作用點(diǎn)選在后齒架質(zhì)心位置���。系統(tǒng)默認(rèn)命名為Joint12��。
2.2.2 行星輪系齒輪副的創(chuàng)建
齒輪
13��、副關(guān)聯(lián)兩個(gè)旋轉(zhuǎn)副和一個(gè)方向坐標(biāo)系(Marker)�����,除了兩上個(gè)要求外���,齒輪副還要求這兩個(gè)旋轉(zhuǎn)副關(guān)聯(lián)的第一個(gè)構(gòu)件和第二各構(gòu)件分別為齒輪1和共同體、齒輪2和共同體���,共同件是齒輪的載體[3]��。本機(jī)構(gòu)中���,共同的載體即為前后行星架���。另外還要求方向坐標(biāo)系固定在共同件上,且方向坐標(biāo)系Z軸的方向指向齒輪嚙合的方向���,Z軸也是齒輪嚙合力的方向����。若想取得進(jìn)行計(jì)算成功����,必須滿足以上條件。
辛普森行星齒輪機(jī)構(gòu)結(jié)構(gòu)復(fù)雜����,共具有六個(gè)行星輪,行星輪與太陽輪的旋轉(zhuǎn)副作用點(diǎn)間的連線并未和全局坐標(biāo)系的任一軸平行或重合�����。因此在創(chuàng)建齒輪副所需的兩個(gè)相關(guān)聯(lián)旋轉(zhuǎn)副間需建立一個(gè)新的局部坐標(biāo)系,以滿足方向坐標(biāo)系Z軸指向齒輪嚙合方向的條件���。以創(chuàng)
14�、建太陽輪與行星輪之間齒輪副為例�����,具體操作如下:
(1)在幾何工具欄上單擊創(chuàng)建局部坐標(biāo)系按鈕����,建立一個(gè)與全局坐標(biāo)系方向相同的過渡坐標(biāo)系(Marker-25)����,且通過修改過渡坐標(biāo)系的坐標(biāo)值保證坐標(biāo)系Marker-25與行星輪旋轉(zhuǎn)副作用點(diǎn)坐標(biāo)系(Marker-3)在Z軸坐標(biāo)值相同。
(2)重新單擊局部坐標(biāo)系按鈕���,在Marker欄選擇Add to Part�����,將坐標(biāo)系建立在行星架(后齒圈)上���。Oriention欄選擇X����,Y Axis����,先選擇過渡坐標(biāo)的原點(diǎn)作為新坐標(biāo)系原點(diǎn),然后在太陽輪旋轉(zhuǎn)軸線上選擇任意一點(diǎn)以確定X軸方向��,然后選擇行星輪旋轉(zhuǎn)副的作用點(diǎn)處以確定Y軸方向����,從而確保了Z軸指向齒輪嚙合方向。根
15�、據(jù)兩個(gè)齒輪的傳動(dòng)比計(jì)算出齒輪嚙合處的坐標(biāo)值,然后修改剛創(chuàng)建的方向坐標(biāo)系(Marker-26)的坐標(biāo)值使其移動(dòng)至齒輪嚙合點(diǎn)處����。
(3)單擊齒輪副按鈕,在對(duì)話框中的Joint Name輸入框中輸入相應(yīng)的旋轉(zhuǎn)副名稱(Joint1 和joint 2)���,在Common Velocity Marker輸入欄拾取上面剛建立的方向坐標(biāo)系(Marker-26)�����,點(diǎn)擊確定���。至此����,前排太陽輪與一個(gè)行星輪間的齒輪副GEAR1創(chuàng)建完畢�。
在此需需要說明的是,為避免不同齒輪間創(chuàng)建的齒輪副產(chǎn)生過約束���,對(duì)于前排的三個(gè)行星輪�����,只需要一個(gè)行星輪既與齒圈創(chuàng)建齒輪副又和太陽輪創(chuàng)建齒輪副,另外兩個(gè)只與太陽輪創(chuàng)建齒輪副即可��。
(4
16�����、)參照前排行星輪機(jī)構(gòu)的齒輪副創(chuàng)建方法�,分別在太陽輪與后排行星輪間創(chuàng)建齒輪副。至此���,齒輪副創(chuàng)建完畢�����。詳見圖4示���。
2.3添加驅(qū)動(dòng)
辛普森行星齒輪機(jī)構(gòu)可通過多個(gè)離合器以及制動(dòng)器的組合使用實(shí)現(xiàn)三進(jìn)一退的操作���。以下是變速器換擋執(zhí)行組件的布置圖(圖5)。
圖5 辛普森式三檔行星齒輪變速器
離合器C1用于連接輸入軸和前后太陽輪組件����,離合器C2用于連接輸入軸和前內(nèi)齒圈,制動(dòng)器B1用于固定器前后太陽輪組件�����,制動(dòng)器B2和單向超越離合器F1都適用于固定后行星架�����。換擋操作件在個(gè)檔位的工作情況見表2�����。
表2 變速器檔位與操作件工作表
檔位
操作組件
1檔
C2+F1
2檔
C2+B1
3檔
17、
C1+C2
倒檔
C1+B2
以下是各個(gè)檔位約束與驅(qū)動(dòng)的添加操作:
(1)前進(jìn)一檔的仿真 根據(jù)工作原理��,將后支架與大地ground鎖定�,輸入軸與前齒圈聯(lián)接,故將驅(qū)動(dòng)添加在外齒圈上�����。因?yàn)榇饲皠?chuàng)建在前齒圈的旋轉(zhuǎn)副是相對(duì)于行星架(后齒圈)的���,所以添加旋轉(zhuǎn)驅(qū)動(dòng)所需要的旋轉(zhuǎn)副需要重新在前齒圈與大地ground之間創(chuàng)建�,系統(tǒng)默認(rèn)為Joint14��。單擊工具欄中的旋轉(zhuǎn)驅(qū)動(dòng)按鈕�����,拾取旋轉(zhuǎn)副Joint10����,在speed一欄中輸入3000r/s�。單擊主工具欄中的仿真計(jì)算按鈕,彈出交互仿真控制對(duì)話框��,仿真時(shí)間設(shè)為20s,步數(shù)設(shè)為500步�。
(2)前進(jìn)二擋的仿真 根據(jù)工作原理,將太陽輪與大地ground鎖定
18���、�����,輸入軸與前齒圈聯(lián)接�����,因此驅(qū)動(dòng)添加在前齒圈上����,具體方法同一檔位仿真���。
(3)前進(jìn)三檔的仿真 根據(jù)工作原理�,將前齒圈與太陽輪鎖定(機(jī)構(gòu)全部鎖定)�����,輸入軸與前內(nèi)齒圈聯(lián)接��,因此驅(qū)動(dòng)添加在前內(nèi)齒圈上,具體方法同上�。
(4)倒檔的仿真 根據(jù)工作原理,將后行星架與大地ground鎖定����,輸入軸與太陽輪聯(lián)接,因此驅(qū)動(dòng)添加在太陽輪組件上����,具體方法同上。
2.4計(jì)算求解與結(jié)果后處理
2.4.1各檔位運(yùn)動(dòng)仿真的計(jì)算求解
在主工具欄中點(diǎn)擊仿真按鈕��,由仿真結(jié)果可以對(duì)輸出軸(后齒圈)的轉(zhuǎn)速進(jìn)行測量��。在前進(jìn)一檔(D1)的仿真環(huán)境中�,選擇Joint6,右鍵選擇Measure���,在Characteristic欄中選擇
19����、Relative Angular Velocity���,選擇Z軸方向��,單擊確定�。得到前進(jìn)一檔時(shí)輸出軸轉(zhuǎn)速曲線如圖6示�。同樣,在前進(jìn)二檔(D2)�����、三檔(D3)及倒檔(R)的仿真環(huán)境中��,分別得到輸出軸轉(zhuǎn)速曲線圖如圖7�����、8��、9所示����。
圖6 一檔時(shí)輸出軸速度曲線
圖7 二檔時(shí)輸出軸速度曲線
圖8 三檔時(shí)輸出軸速度曲線
圖9 倒檔時(shí)輸出軸速度曲線
2.4.2與理論計(jì)算值的比較
根據(jù)行星齒輪機(jī)構(gòu)一般運(yùn)動(dòng)規(guī)律方程:+a =(a+1),
式中——太陽輪轉(zhuǎn)速;
——內(nèi)齒輪轉(zhuǎn)速���;
——行星架轉(zhuǎn)速���;a——內(nèi)齒圈數(shù)與太陽輪齒數(shù)比�,稱為行星齒輪組的特性參數(shù)���。
由特性公式計(jì)算的各檔位的理論輸
20���、出角速度應(yīng)為:=1250 , =2142.875, =3000, = -1200。對(duì)理論值與仿真值進(jìn)行比較分析參見表格 3���。
表格3 仿真值與理論值的對(duì)比分析 deg
1檔
2檔
3檔
倒檔
理論值
1250
2142.875
3000
-1200
仿真值
1250
2143
3000
-1200
誤差(%)
0
0.0058
0
0
對(duì)比可見���,經(jīng)Adams仿真得出數(shù)值與理論值基本一致,誤差小于0.0058%�����。其出現(xiàn)誤差的原因����,蓋因
21、為創(chuàng)建齒輪副所需要的方向坐標(biāo)系的坐標(biāo)值用小數(shù)表示��,故有略小誤差����,但基本不影響其運(yùn)動(dòng)學(xué)分析及后期的動(dòng)力學(xué)分析��。微小誤差可以忽略不計(jì)。
3 結(jié)束語
基于UG三維造型軟件的參數(shù)化建模功能對(duì)辛普森行星輪機(jī)構(gòu)建模并裝配�����,成功導(dǎo)入到Adams軟件中���。根據(jù)自動(dòng)變速器中辛普森機(jī)構(gòu)的實(shí)際工作狀態(tài)��,對(duì)其組件分別添加約束和驅(qū)動(dòng)����,實(shí)現(xiàn)了辛普森行星齒輪機(jī)構(gòu)三進(jìn)一退四個(gè)檔位的運(yùn)動(dòng)仿真����,機(jī)構(gòu)中各個(gè)組件的運(yùn)動(dòng)狀態(tài)清晰明了。在后處理模塊中����,通過對(duì)輸出軸的速度輸出曲線的測量,得到的仿真數(shù)據(jù)與真實(shí)數(shù)據(jù)高度一致�。對(duì)于出現(xiàn)的略小誤差,分析其原因主要是因?yàn)樵诮X輪嚙合方向坐標(biāo)系的坐標(biāo)值用小數(shù)來表示所造成的。由于誤差僅為0
22���、.0058%����,故對(duì)整體機(jī)構(gòu)的運(yùn)動(dòng)學(xué)分析及動(dòng)力學(xué)分析不會(huì)造成影響����。對(duì)于辛普森行星齒輪機(jī)構(gòu)的運(yùn)動(dòng)學(xué)仿真,達(dá)到了預(yù)期的目的�。
參考文獻(xiàn)
[1 ] 田晉躍。車輛自動(dòng)變速器構(gòu)造原理與設(shè)計(jì)方法[J]��。北京大學(xué)出版社�,2009。
[2] 賀斌����,管殿柱。UG NX 4.0三維機(jī)械設(shè)計(jì)[J]���。機(jī)械工業(yè)出版社�����,2008
[3] 李增剛��。ADAMS入門詳解與實(shí)例�����。國防工業(yè)出版社�����,2008
[4] 徐愷,鄧效忠,吳劍. 行星傳動(dòng)系統(tǒng)的快速虛擬裝配[J ] . 機(jī)械傳動(dòng), 2008 ����,32 (1) :65 - 67.
[5]丁飛����,張強(qiáng)?;贏DAMS的行星齒輪減速器的建模與仿真研究。2009���,6:84 – 86����。
 基于UG建模的辛普森行星齒輪在ADAMS中運(yùn)動(dòng)仿真的實(shí)現(xiàn)(共5頁)
基于UG建模的辛普森行星齒輪在ADAMS中運(yùn)動(dòng)仿真的實(shí)現(xiàn)(共5頁)